最後にシステム->USB->オーディオI/Fで「ステレオミックス(PC/Mac)」を選択。これでPC側からは「ZOOM Recording Mixer (ZOOM H and F Series Audio)」というサウンドデバイスとして認識されるので、ZoomやTeamsのマイクソースとして選択する。
残念ながらこの状態ではF6側の録音はできない模様。録音フォーマットを「AIR with Rec」モードを使ってPCに認識させればできそうだけど、WindowsではASIOデバイス扱いになるので、Zoomなどのマイクソース選択メニューに現れなかった。
個人的には4 HDMIスイッチャーであるATEM Mini Proにワイヤレス入力を追加するバディガジェットとして最適かなと感じています。この手の互換キャストデバイスとしてはAnyCastのようなドングル形状のものがよくありますが、ATEM Miniのように複数のコネクタが並んだ機器に挿す時に隣のポートに干渉するリスクがあります。その点、本製品なら普通のHDMIケーブルくらいのコネクタ幅なので問題なしです。
テスト結果は上々。iPhone(AirPlay)はもちろん、Pixel3XL(GoogleCast)、Galaxy Note10+ (Smart View)、Surface Pro X(Miracast)からのキャストができました。ATEM Mini Pro経由でOBS Studioに収録もできました。Chromecastのように無条件に著作権保護していて真っ黒、なんてことがなく安心です(ただし説明書によるとAmazon PrimeやNetflixなど著作権保護されたコンテンツを再生すると真っ黒になる場合もあるようです。映画などを大画面に映すようにお考えの場合は個別に対応状況を御確認ください)。
右側で目立つのは「CUT」「AUTO」「FTB」です。CUTとAUTOは排他(どちらか選択)操作で、CUTは一瞬でパッと切り替わるモード。AUTOはトランジション効果(PowerPointでいうアニメーション)をつけて切り替えるモードです。「AUTO」の上の6つがトランジションのパターン、「CUT」の上がその持続時間(0.5秒、1秒、1.5秒、2秒)です。「FTB」はFade To Blackの略です。どんな映像を映していようと問答無用で徐々に映像が暗くなって消えます。いわゆるフェードアウトです。もう一度押とフェードインで復帰します。動画の最初と最後に使ったり、放送事故がおきた時に問答無用で押すボタンと憶えておきましょう(笑)。
そこで登場するのがZoom、Skype、Skype for Business、Teams、Chatworkといったビデオ会議サービスです。これらはカメラ映像、音声、そして画面共有などができるので機能要件を満たします(基本的に双方向会話のためのものなので、観察サイト側のマイクやカメラをミュートしておくなどの配慮は必要ですが)。テキストチャット機能も並行して利用できるので、見学者間で意見交換したりモデレーターに追加質問を依頼したりといったことにも使えます。またZoomなど録画機能が使えるものもあります。そして何より大事なのは多くの企業が既にこれらのサービスを利用しているということです。設定も済んでおり操作に慣れていてすぐに使えるというのもありますし、ルール的にも新たに別のサービスを業務で利用したいと申請するよりは許可が下りやすいのではないでしょうか。
例えばモニタさんとモデレーターの対話の様子を映したり、より大きなデバイス(プリンターとか)のUTやOOBE(Out of Box Experience)のテストでテーブル全体を映したいといった場合にはより広角の映像が必要になります。最近では会議室で複数の参加者を映すために広角寄りのウェブカメラもありますがせいぜい画角90°というところです。またUTだと随時ズームで手元に寄ったりと光学ズーム性能も要求されるので、ここはやはりビデオカメラが使いやすいでしょう。問題は多くのビデオカメラはHDMI出力しかないことです。例えPCにHDMI端子があってもこれも出力専用。つないでもカメラの映像を取り込むことはできません。
そこで必要になるのがこうしたHDMI->USBキャプチャーデバイスです。
HDMI信号(映像&音声)をUSBウェブカメラ互換(USB Video Class)でPCに認識させる変換してくれます。これ自身の電源はUSBからとるので、PCのUSBポートとビデオカメラのHDMIポートそれぞれに1本ずつケーブルをつなぐだけのシンプル構成。PC側のケーブルは付属しているのであとは必要に応じた長さのHDMIケーブルを用意すればすぐ使えます。USB Video Class規格なのでドライバーソフト等のインストール不要でWIndowsでもMacでも使えるので、勝手にソフトを入れられない会社PCにもフレンドリーです。
「When the scientists placed virus-laden droplets on plastic, they found that half of the virus was gone after about seven hours. Half of what remained was gone after another seven hours, and so on. By the end of Day Two, there was less than 1/100 of the original amount, and after three days the remnants were barely detectable.」(意訳:プラスチックに付着させて、7時間で半分。次の7時間でまた半分。2日目の終わりには1/100以下。3日目にはほぼ検出不能。)
「For stainless steel, the half-life for the virus was five or six hours, and for cardboard it was even shorter: less than four hours.」(ステンレスなら”半減期”は5,6時間。段ボールは4時間以下。)
「Still, it can’t hurt to wash your hands after taking groceries out of the bag, opening a newly delivered envelope, or retrieving the newspaper. Soap and water does the job.(意訳:それでもまぁ買い物袋から品物を出したり、届いた封筒を開封したり、新聞を回収した時には手洗いをした方がいい。石鹸と水でOK。)」

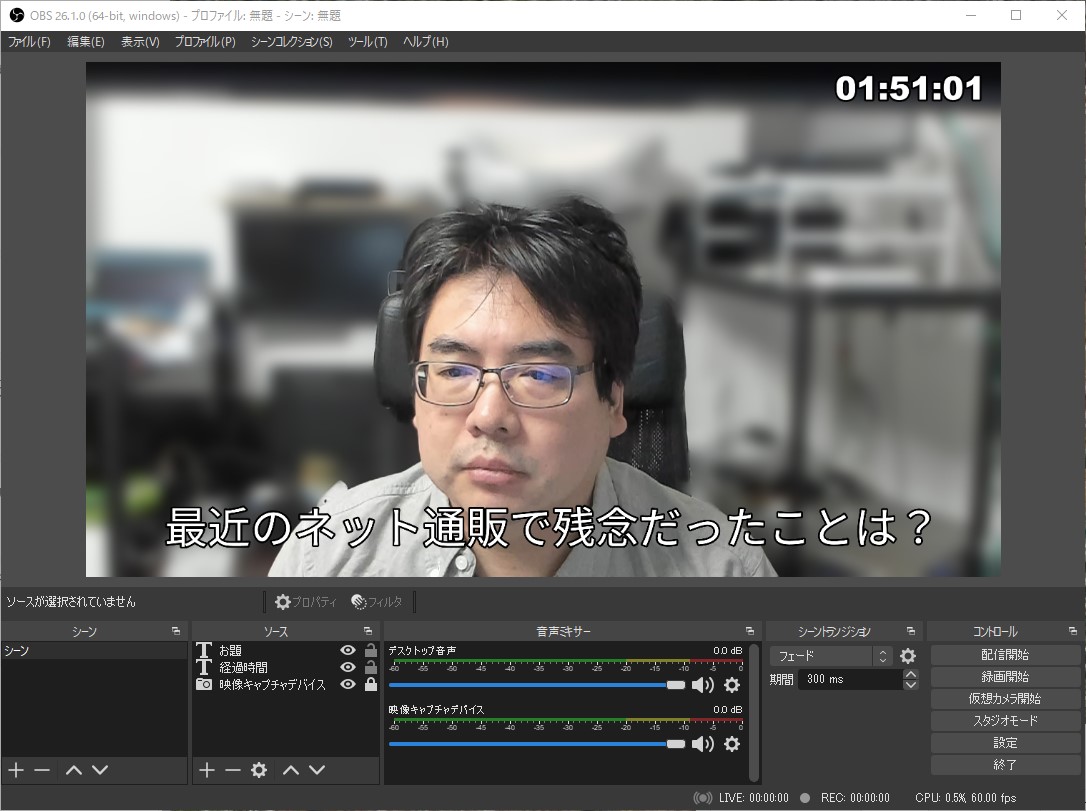 フォントカラーの他に縁取りの色や太さも指定できるので背景映像に埋もれて醜くなるのを避けることができます。
フォントカラーの他に縁取りの色や太さも指定できるので背景映像に埋もれて醜くなるのを避けることができます。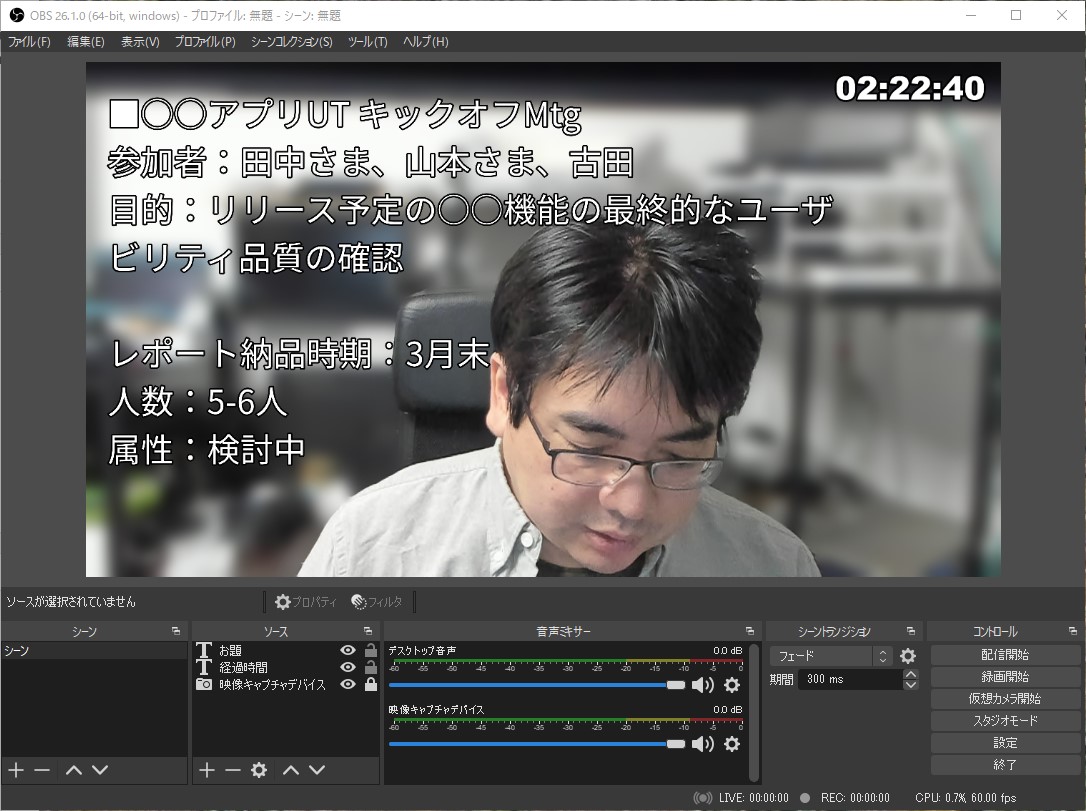 設定画面内の「チャットログモード」という機能を有効にすると、テキストファイル中の指定した最後の行数だけを表示してくれる(UNIXでいうtailフィルタ)ので、書き進めるにつれてスクロールしていく感じになります。
設定画面内の「チャットログモード」という機能を有効にすると、テキストファイル中の指定した最後の行数だけを表示してくれる(UNIXでいうtailフィルタ)ので、書き進めるにつれてスクロールしていく感じになります。