CandyHouse製スマートロックSesame5を顔認証と静脈認証(とNFC)で解錠できるSesameフェイスど導入して一ヶ月経ちました。自分が運転して駐車場に車庫入れをする関係上、同居人が先に玄関で解錠することがほとんどで、自分は数日に一度くらいしか使用しませんが、認識率、速度などはほぼ不満なく使用しています。
外出時の施錠もSesame Touchでは未登録指紋をトリガにする関係で、わざわざ未登録の指や手のひらで認識エラーを起こす必要があったのが、本機では専用ボタンがついてスピーディになりました。ボタンは少し小さいですが、我が家では3Dプリンターでボタン大型化カバーをつけて使い勝手を改善しています。

■バッテリー消費と認識不備と設置の問題
Facebookグループを見ているとSesameフェイスシリーズの電池寿命が公式が謳っているほど保たないんじゃないかという言説が飛び交っています。ウチも写真のように3Dプリンター部品製作作業をするために卓上に一日置いてたら激減りして既に一度電池交換していますが、やはり近接レーダーが物体の接近を感知して認識処理を走らせることで電力を消費するため、人通りが多い道路/通路に面していたりすると想定以上にバッテリーが減ってしまうといったこともあるようです。アプリからレーダー範囲を狭めたりもできるので、設定環境にあわせた設定調整が必要となります。
もうひとつは赤外線で物体を読み取る関係上、直射日光が本体センサー部や認識対象の顔/手のひらに強く当たっていると認識しづらいということもあるようです。その場合は、日照条件ごと(例:日が当たる時間帯とそうでない時間帯)に顔や静脈を登録すると良いとアナウンスされています。
■そうだ向きを変えよう
そんな中Facebookグループで、ドアや壁にベタ付けするのではなく、ナナメに角度をつけて設置することで、
- アプローチアングルに最適化しより早い段階で反応させる
- 通りすがりの人に反応しにくいようにする
といった仮説でDIYされている方をお見かけしました(リスペクトしておりますが実名参加なのでお名前は出さないでおきます)。その方が「3Dプリンターで作ってくれないかなー」と呟いておられたので、手を挙げてみました。
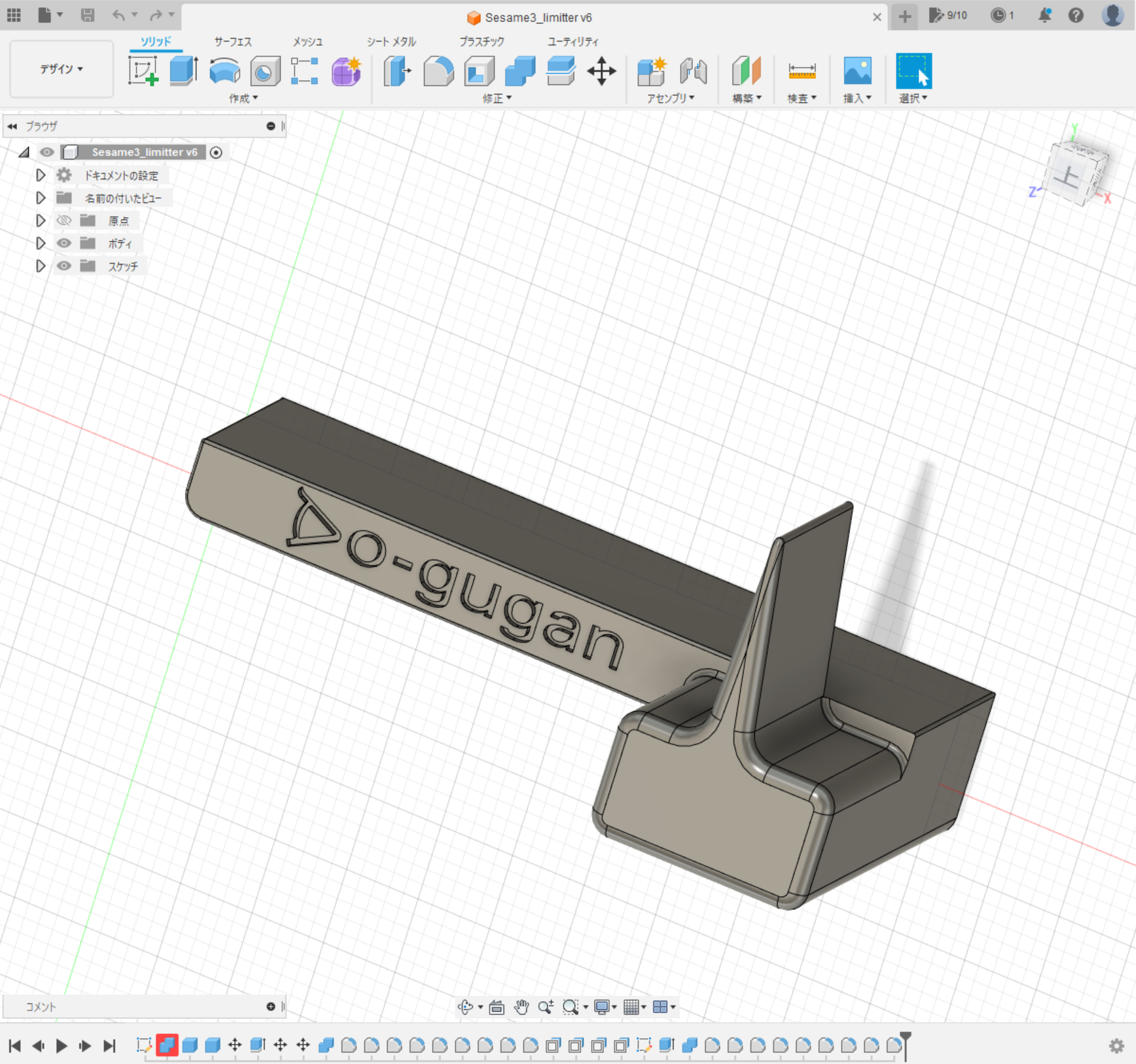
仕掛けとしてはSesameフェイス背面の取り付けパネルの形状にあわせて介在させる形で、Fusionのパラメトリックデザイン機能(数値変更で形状を自動変化させる機能)を活用して、リア側とフロント側の角度と距離を自在に調整できるようにしました。ナナメにすることでリアとフロントが干渉しうるので距離も調整事項になっている形です。実際のパラメーター変更で様々なバリエーションにしている様子は下記の動画でご覧いただけます。
同じくFacebookグループで直射日光を避けるために上下にもアングルがつけられると良いのではという書き込みがあったので、左右だけでなく上下の角度も変えられるようにしてみました(その組み合わせも可能)。
もし使ってみたいという方がいたら希望の角度を伺ってカスタムオーダーが簡単に受けられる環境が整ったというわけです。実際に角度をつけることでバッテリー消費が抑えられたり認識エラーが減らせるかどうかは環境次第なので保証はできませんが、これらの現象に悩まれている方がいたら同じSesameフェイスユーザとして一助になれればと思います。
なお同グループでの当該の書き込みに対してCANDY HOUSE社CEO自らも「製品化したい!」というコメントを書き込んでおり、いずれ公式からもなにかしらのアクセサリが販売される可能性もあります。それがいつどのような選択肢になってくるかは未知数ですが、アングルをつけるというアプローチ自体はCEOも一定の価値を認めているのかなというところです。
■設置例
テスト用のPLAフィラメントで造形したのでグレーです。本体に合わせるなら黒がいいんでしょうが、日光が当たるところで発熱しやすいと考えると、白寄りの明るい色がいいのかなと思います。我が家はガラス面につけてますが、壁側の色にあわせるのもアリかも知れません。


製品付属の背面プレート形状に沿った形で、Sesameフェイス本体の下側は飛び出る形になります。
■頒布情報
期待される効果として、
- 自身がアプローチする方向に向けることで、より早い段階で認識させる(ノーウェイト解錠)
- 余計な人通りに反応させないようにしてバッテリー消費を軽減する
- 日照など強い赤外光を避けることで認識率を向上させる
などがありますが、実際に効果があるかは環境次第なので保証はいたしかねます。あくまでご指定いただいた角度通りに製作してお届けするものとお考えください。設置してみて角度があわなかった場合、1回は無償で再作成をいたします。
Sesameフェイスにはイタズラや盗難で持ち去りにくくするための固定ネジ(実測でM1.4×4と推察)が付属しています。本品を使うことで二箇所のネジ止めが必要になりますので、互換性があると思われるネジを添付します。ただし添付品と同等の固定力や盗難防止効果を保証するものではありません。
造形カラーはその時のフィラメント材料の在庫の範囲でご希望に添うように調整いたしますが、太陽光の熱線を吸収しやすい黒の場合は耐熱性の高い素材を使用するため材料費が少しあがります。
本品は数字キーのないSesameフェイス用です。現状SesameフェイスPro(数字キー付きモデル)は手元に実機がないので対応不可です。要望が多かったり、設計に必要な採寸にご協力いただける方がいらしたら対応するかも知れません。
角度の考え方
アダプタ無しで壁面に普通につけた状態を0°とします。真左に向けたら「左に90°」で、真正面と真横の中間なら45°となります。坂道の傾斜角と同じで、数字に対して抱くイメージよりも大きく傾くとお考えいただくと良いと思います。10°というと誤差くらいの印象だと思いますが、実際には結構傾きます。
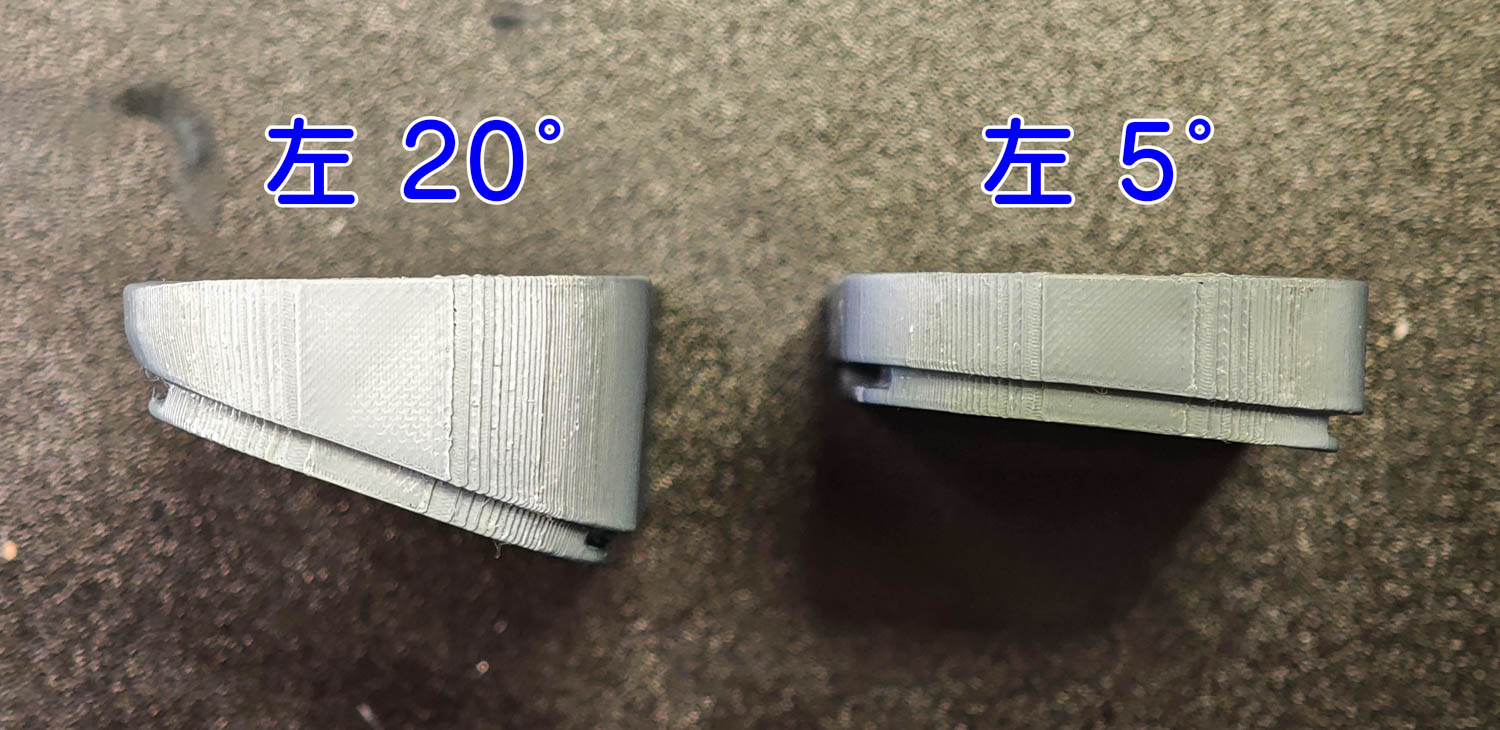
また傾けるほど手前への突き出しも多くなりますのでご注意ください。
こちらで注文できます
Sesameフェイス用傾斜設置マウント

参考価格: ¥800(別途消費税、送料がかかります)
在庫: なし